Conditional GAN
CV | 2022年12月16日 | 阅读:2073次
1. 概述
GAN的出现为数据生成提供了一种新的思路,以图像生成为例,在GAN框架中,不再需要其他复杂的操作,如Markov Chain等,只需要对定义好的网络进行backpropagation即可完成生成网络的训练。在原始的GAN框架中,包括了两个部分,分别为生成网络(Generator)G和判别网络(Discriminator)D,其中生成网络(Generator)G用于生成图片,判别网络(Discriminator)D用于判别一张图片是否是真实的。通过不断提高生成网络G的生成质量,最终“骗”过判别网络D,在此过程中,判别网络D也在不断提高自身的判别能力,通过如此的一个动态的“博弈”过程,最终,训练好的生成网络G便可以用于生成“以假乱真”的图片。
然而在所有的过程中,无论是生成过程还是判别过程都是无任何指导的,Conditional GAN[1]提出在上述的两个过程中引入一个条件,以此指导上述的两个过程。
2. 算法原理
2.1. GAN原理回顾
在原始的GAN框架中,包括了两个部分,分别为生成网络(Generator)G和判别网络(Discriminator)D,其中:
- 生成网络(Generator)G用于生成图片,其输入是一个随机的噪声z,通过这个噪声生成图片,记作G(z)
- 判别网络(Discriminator)D用于判别一张图片是否是真实的,对应的,其输入是一整图片x,输出D(x)表示的是图片x为真实图片的概率
在GAN框架的训练过程中,希望生成网络G生成的图片尽量真实,能够欺骗过判别网络D;而对于判别网络D,希望能够把G生成的图片从真实图片中区分开。这样的一个过程就构成了一个动态的“博弈”。最终,GAN希望能够使得训练好的生成网络G生成的图片能够以假乱真,即对于判别网络D来说,无法判断G生成的网络是不是真实的。此时,训练好的生成网络G便可以用于生成“以假乱真”的图片。
GAN的价值函数:
GminDmaxV(D,G)=Ex∼pdata(x)[logD(x)]+Ez∼pz(z)[log(1−D(G(z)))]
GAN的训练过程如下所示:
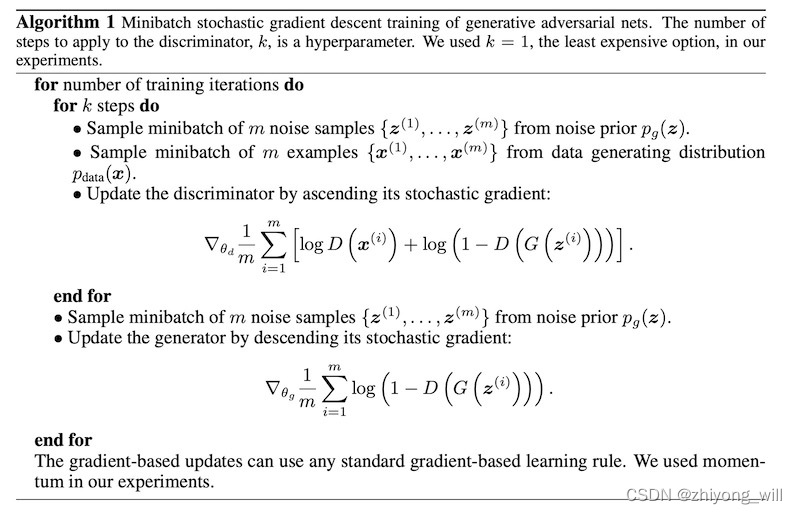
2.2. Conditional GAN
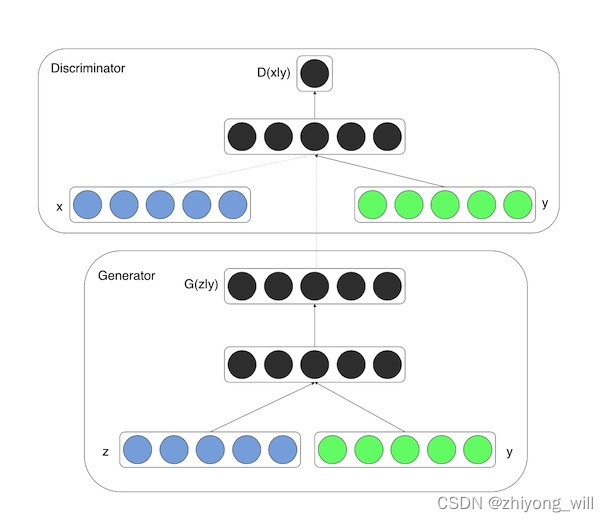
Conditional GAN的思想也比较简单,在GAN的基础上增加了条件输入,在生成网络和判别网络中分别加入一个条件输入y,y可以为任何的额外信息,分别与原始的x和z这两个输入concat在一起,如下图所示:
Conditional GAN的价值函数:
GminDmaxV(D,G)=Ex∼pdata(x)[logD(x∣y)]+Ez∼pz(z)[log(1−D(G(z∣y)))]
假设从真实数据中采样m个样本{x(1),x(2),⋯,x(m)},从噪音分布pg(z)中同样采样m个样本,记为{z(1),z(2),⋯,z(m)},针对每一个样本,都有一个对应的条件,记为{y(1),y(2),⋯,y(m)},此时,上述价值函数可以近似表示为:
GminDmaxV(D,G)≈i=1∑m[logD(x(i)∣y(i))]+i=1∑m[log(1−D(G(z(i)∣y(i))))]
简化后为:
GminDmaxV(D,G)≈i=1∑m[logD(x(i)∣y(i))+log(1−D(G(z(i)∣y(i))))]
训练过程中只需修改上述的梯度公式,其余与GAN的训练一致。
3. 总结
Conditional GAN的思路相对于传统的GAN来说比较直接,在生成网络和判别网络的输入中增加一些额外的信息,用于指导整个过程的训练。
参考文献
[1] Mirza M, Osindero S. Conditional generative adversarial nets[J]. arXiv preprint arXiv:1411.1784, 2014.