1. value-based
在强化学习中,学习的目标是要找到一个策略 ,使得总体回报的期望最高。这里的回报就是状态价值函数 和动作价值函数 。而基于值的方法并不直接对策略 建模,而是先学习并优化价值函数,然后基于价值函数来推导出最优策略:
以上便是 value-based 强化学习的核心思想。
基于值的方法主要有三大类,分别为:动态规划、蒙特卡洛方法和时序差分算法。在动态规划中,需要事先知道转移矩阵 和奖励函数 ,这两个参数就构成了模型,因此动态规划也划分到基于模型(model-based)方法。
在蒙特卡洛方法中,虽不需要事先知道模型,但是更新需要得到当前的采样结束后,才能对动作价值函数 更新,更新较慢,同时,蒙特卡洛方法的高方差也导致了整体的训练会出现不平稳的现象。在蒙特卡洛方法中,其更新公式为:
基于时序差分算法对上述的问题进行了优化,典型的算法如 Sarsa 算法。在 Sarsa 算法中,由于其基于时序差分算法,能充分利用每一步来更新动作价值函数,其更新公式为:
由于每一步的更新都依赖当前的策略 ,故 Sarsa 算法也被称之为 on-policy 的算法。
2. Q-Learning 算法
在 Sarsa 算法中,学习的是策略 下的动作价值函数 :
在其更新公式中,也能发现,每一步的更新都依赖于当前的策略 。而 Q-Learning 算法则是学习最优的动作价值函数 ,而最优的动作价值函数是所有策略里面的最优:
其表示的含义是在状态 下,先执行动作 ,然后之后都采取最优策略时,能够获得的“最大期望回报”。由贝尔曼最优方程,有:
由于 ,对上式进行改写:
改成期望的形式:
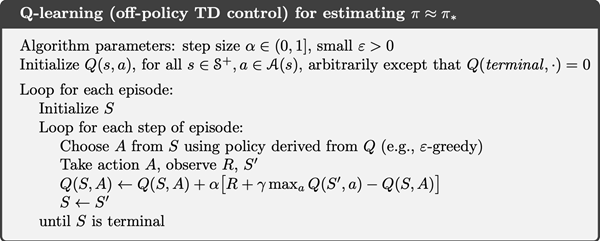
因此有了 Q-Learning 的更新公式:
Q-Learning 算法的整个过程[1]:
3. 算法实现
还是以 Frozen Lake[2] 问题展开实验,实验环境如下:

构建 QLearning 类,并写出完整的代码,如下:
import numpy as np
import gymnasium as gym
class QLearning:
def __init__(self, env):
self.env = env
self.state_size = env.observation_space.n # 状态空间大小
self.action_size = env.action_space.n # 动作空间大小
self.q_table = np.random.uniform(low=0, high=0.01, size=(self.state_size, self.action_size)) # Q-table
# INFO: 设置超参数
self.learning_rate = 0.01
self.discount_rate = 0.95
self.epsilon = 1.0
self.max_epsilon = 1.0
self.min_epsilon = 0.01
self.decay_rate = 0.0005
# 训练过程
self.num_episodes = 500000
self.max_steps = 1000
def train(self):
for episode in range(self.num_episodes):
print(f"episode: {episode}")
state, _ = self.env.reset()
done = False
for step in range(self.max_steps):
# INFO: Epsilon-greedy 策略
if np.random.uniform(0, 1) < self.epsilon:
action = env.action_space.sample() # 探索
else:
action = np.argmax(self.q_table[state, :]) # 利用
new_state, reward, terminated, truncated, info = env.step(action)
done = terminated or truncated # 更新 done 标志
if done:
if reward == 0: # 掉坑
reward = -1
# 到终点 reward=1 保持
else:
reward = -0.01
# Q-table 更新
self.q_table[state, action] = self.q_table[state, action] + self.learning_rate * \
(reward + self.discount_rate * np.max(self.q_table[new_state, :]) - self.q_table[state, action])
state = new_state
if done:
break
# INFO: 更新 epsilon
self.epsilon = self.min_epsilon + (self.max_epsilon - self.min_epsilon) * np.exp(-self.decay_rate * episode)
return self.q_table
再写一段测试的代码,如下:
if __name__ == "__main__":
# INFO: 创建环境
env = gym.make('FrozenLake-v1', map_name="8x8", is_slippery=False)
mc = QLearning(env)
q_table = mc.train()
env.close()
# INFO: 测试
env_test = gym.make('FrozenLake-v1', map_name="8x8", is_slippery=False, render_mode='human')
print("测试环境初始化完成")
state, _ = env_test.reset()
done = False
step = 0
while not done:
action = np.argmax(q_table[state, :])
state, reward, terminated, truncated, _ = env_test.step(action)
done = terminated or truncated
print(f"step={step}, action={action}, state={state}, reward={reward}")
step += 1
print("Test finished.")
env_test.close()
4. 总结
Sarsa 算法和 Q-Learning 算法都是基于时序差分的算法,不同的是在 Sarsa 算法中,其学习的目标是在策略 下的动作价值函数 ,这是一个与当前策略 相关的目标,在策略评估和策略更新时都是基于策略 ,而在 Q-Learning 算法中,其学习的目标是最优的动作价值函数 ,这个目标与策略无关,策略的评估和策略的更新不是同一个策略,因此 Q-Learning 算法也被称为 off-policy 算法。
参考文献
[1] http://incompleteideas.net/book/RLbook2020.pdf
[2] https://gymnasium.farama.org/environments/toy_text/frozen_lake/